Magnetically controlled microrobots show promise for precision drug delivery
Microrobots provide a promising vehicle for precision delivery of therapeutics into the body. But there’s a fine balance needed between optimizing multifunctional cargo loading and maintaining efficient locomotion. A research collaboration headed up at the University of Oxford and the University of Michigan has now developed permanent magnetic droplet-derived microrobots (PMDMs) that meet both of these requirements.
The PMDMs are made from a biocompatible hydrogel incorporating permanent magnetic microparticles. The hydrogel – which can be tailored to each clinical scenario – can carry drugs or therapeutic cells, while the particles’ magnetic properties enable them to self-assemble into chains and perform a range of locomotion behaviours under external magnetic control.
“Our motivation was to design a microrobot system with adaptable motion capabilities for potential applications in drug delivery,” explains Molly Stevens from the University of Oxford, experimental lead on this study. “By using self-assembled magnetic particles, we were able to create reconfigurable, modular microrobots that could adapt their shape on demand – allowing them to manoeuvre through complex biological terrains to deliver therapeutic payloads.”
Building the microrobots
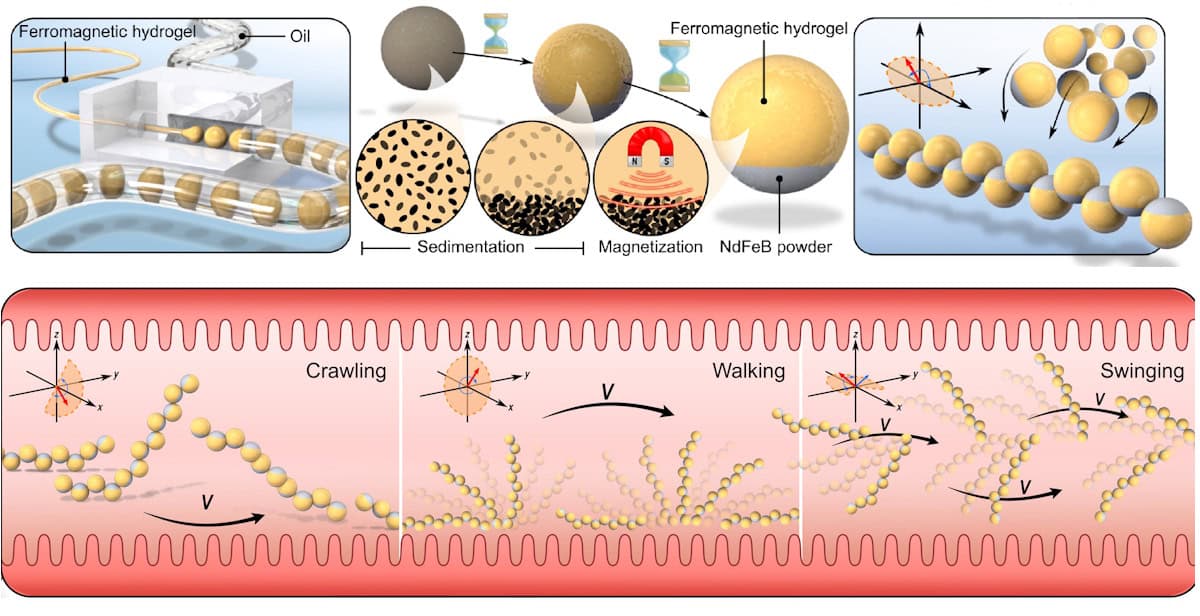
To create the PMDMs, Stevens and collaborators used cascade tubing microfluidics to rapidly generate ferromagnetic droplets (around 300 per minute) from the hydrogel and microparticles. Gravitational sedimentation of the 5 µm-diameter microparticles led to the formation of Janus droplets with distinct hydrogel and magnetic phases. The droplets were then polymerized and magnetized to form PMDMs of roughly 0.5 mm in diameter.
The next step involved self-assembly of the PMDMs into chains. The researchers demonstrated that exposure to a precessing magnetic field caused the microrobots to rapidly assemble into dimers and trimers before forming a chain of eight, with their dipole moments aligned. Exposure to various dynamic magnetic fields caused the chains to move via different modalities, including walking, crawling, swinging and lateral movement.
The microrobots were able to ascend and descend stairs, and navigate obstacles including a 3-mm high railing, a 3-mm diameter cylinder and a column array. The reconfigurable PMDM chains could also adapt to confined narrow spaces by disassembling into shorter fragments and overcome tall obstacles by merging into longer chains.
Towards biomedical applications
By tailoring the hydrogel composition, the researchers showed that the microrobots could deliver different types of cargo with controlled dosage. PMDMs made from rigid polyethylene glycol diacrylate (PEGDA) could deliver fluorescent microspheres, for example, while soft alginate/gelatin hydrogels can be used for cell delivery.
PMDM chains also successfully transported human mesenchymal stem cell (hMSC)-laden Matrigel without compromising cell viability, highlighting their potential to deliver cells to specific sites for in vivo disease treatment.
To evaluate intestinal targeting, the researchers delivered PMDMs to ex vivo porcine intestine. Once inside, the microrobots assembled into chains and exhibited effective locomotion on the intestine surface. Importantly, the viscous and unstructured tissue surface did not affect chain assembly or motion. After navigation to the target site, exposing the PMDMs to the enzyme collagenase instigated controlled cargo release. Even after full degradation of the hydrogel phase, the chains retained integrity and locomotion capabilities.
The team also demonstrated programmable release of different cargoes, using hybrid chains containing rigid PEGDA segments and degradable alginate/gelatin segments. Upon exposure to collagenase, the cargo from the degradable domains exhibited burst release, while the slower degradation of PEGDA delayed the release of cargo in the PEGDA segments.

In another potential clinical application, the researchers delivered microrobots to 3D-printed human cartilage with an injury site. This involved catheter-based injection of PMDMs followed by application of an oscillating magnetic field to assemble the PMDMs into a chain. The chains could be navigated by external magnetic fields to the targeted injury site, where the hydrogel degraded and released the drug cargo.
After drug delivery, the team guided the microrobots back to the initial injection site and retrieved them using a magnetic catheter. This feature offers a major advantage over traditional microrobots, which often struggle to retrieve magnetic particles after cargo release, potentially triggering immune responses, tissue damage or other side effects.
“For microrobots to be clinically viable, they must not only perform their intended functions effectively but also do so safely,” explains co-first author Yuanxiong Cao from the University of Oxford. “The ability to retrieve the PMDM chains after they completed the intended therapeutic delivery enhances the biosafety of the system.”
Cao adds that while the focus for the intestine model was to demonstrate navigation and localized delivery, the precise control achieved over the microrobots suggests that “extraction is also feasible in this and other biomedically relevant environments”.
Predicting PMDM performance
Alongside the experiments, the team developed a computational platform, built using molecular dynamics simulations, to provide further insight into the collective behaviour of the PMDMs.
“The computational model was instrumental in predicting how individual microrobot units would self-assemble and respond to dynamic magnetic fields,” says Philipp Schoenhoefer, co-first author from the University of Michigan. “This allowed us to understand and optimize the magnetic interactions between the particles and anticipate how the robots would behave under specific actuation protocols.”
The researchers are now using these simulations to design more advanced microrobot structures with enhanced multifunctionality and mechanical resilience. “The next-generation designs aim to handle the more challenging in vivo conditions, such as high fluid shear and irregular tissue architectures,” Sharon Glotzer from the University of Michigan, simulation lead for the project, tells Physics World.
The microrobots are described in Science Advances.
The post Magnetically controlled microrobots show promise for precision drug delivery appeared first on Physics World.

